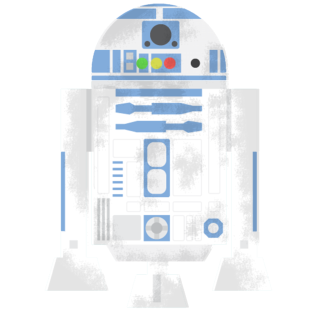
This self navigating R2-D2 robot was made using an aluminum pop can and basic electronic components. It uses two push
buttons located on the front of the robot to find obstacles and move out of the way accordingly. When one of the buttons is
pressed, the robot makes noise, flashes an LED depending on the side of impact, then moves away and continues in the forward
direction.
•
Pop can
•
Transistors (NPN)
•
2x Geared motors & wheels
•
Speaker
•
2x Push buttons
•
LEDs
•
9V battery
•
Various resistors
•
Wires & wire strippers
•
Soldering Iron & solder
•
Prototype matrix board
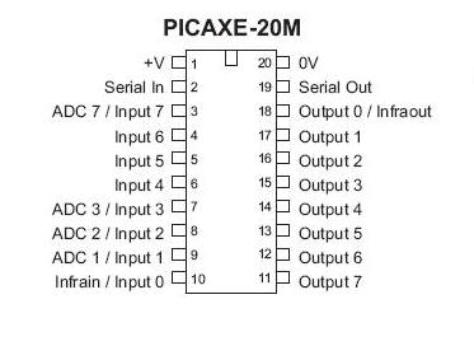
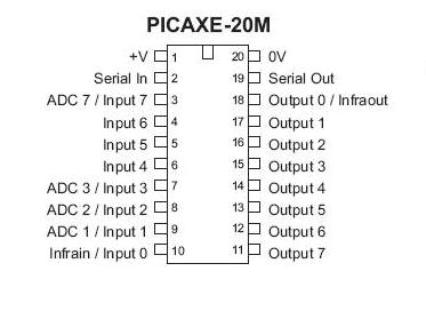
The PICAXE is a small programmable microcontroller that can
be used in a wide variety of applications. It can be programmed
in BASIC or through graphical flowchart software. The 20M is a
20 pin chip including multiple input and outputs. Its compact
size makes it great for projects like this.
This project was coded in BASIC on the PICAXE-20M IC chip. When the program starts, outputs 3 and 7 are turned on, which
activate the transistors in each H-bridge that makes each motor turn in the forward direction. The robot keeps going forward until
input 0 or 2 receives a high value from a pushbutton on the front of the robot (meaning it hit a wall). At this point a sound is
played through the speaker on output 4, then runs its turning procedure. Here it will turn on pins 2 and 6 which will make it go in
reverse. It will reverse for a short amount of time (approx. 1s). Outputs 2 and 7 or 3 and 6 activate depending on if the left or right
button was pressed causing the motors to spin in opposite directions, thus turning it left or right 90 degrees (angle determined
by time outputs are on). It will then go forward again and repeat the program. The lights are also turned on according to the
direction of the motors. Green for forward (output 7), yellow for back (output 6) and red for stop (output 5). A combination of
green and yellow means the robot is turning.
To download the source code and try it for yourself visit my github by
clicking the link below.
For additional information email me at



Omid G
2018














Omid G
2018
CODE
This
project
was
coded
in
BASIC
on
the
PICAXE-20M
IC
chip.
When
the
program
starts,
outputs
3
and
7
are
turned
on,
which
activate
the
transistors
in
each
H-
bridge
that
makes
each
motor
turn
in
the
forward
direction.
The
robot
keeps
going
forward
until
input
0
or
2
receives
a
high
value
from
a
pushbutton
on
the
front
of
the
robot
(meaning
it
hit
a
wall).
At
this
point
a
sound
is
played
through
the
speaker
on
output
4,
then
runs
its
turning
procedure.
Here
it
will
turn
on
pins
2
and
6
which
will
make
it
go
in
reverse.
It
will
reverse
for
a
short
amount
of
time
(approx.
1s).
Outputs
2
and
7
or
3
and
6
activate
depending
on
if
the
left
or
right
button
was
pressed
causing
the
motors
to
spin
in
opposite
directions,
thus
turning
it
left
or
right
90
degrees
(angle
determined
by
time
outputs
are
on).
It
will
then
go
forward
again
and
repeat
the
program.
The
lights
are
also
turned
on
according
to
the
direction
of
the
motors.
Green
for
forward
(output
7),
yellow
for
back
(output
6)
and
red
for
stop
(output
5).
A
combination
of
green
and
yellow means the robot is turning.

Self Navigating R2-D2
This self navigating R2-D2 robot was made using an
aluminum pop can and basic electronic components. It
uses two push buttons located on the front of the robot
to find obstacles and move out of the way accordingly.
When one of the buttons is pressed, the robot makes
noise, flashes an LED depending on the side of impact,
then moves away and continues in the forward direction.
COMPONENTS
•
Pop can
•
Transistors (NPN)
•
2x Geared motors & wheels
•
Speaker
•
2x Push buttons
•
LEDS
•
9V battery
•
Various resistors
•
Wires & wire strippers
•
Soldering Iron & solder
•
Prototype Matrix Board
PICAXE 20M
The
PICAXE
is
a
small
programmable
microcontroller
that
can
be
used
in
a
wide
variety
of
applications.
It
can
be
programmed
in
BASIC
or
through
graphical
flowchart
software.
The
20M
is
a
20
pin
chip
including
multiple
input
and
outputs.
Its
compact
size
makes
it
great
for
projects like this.